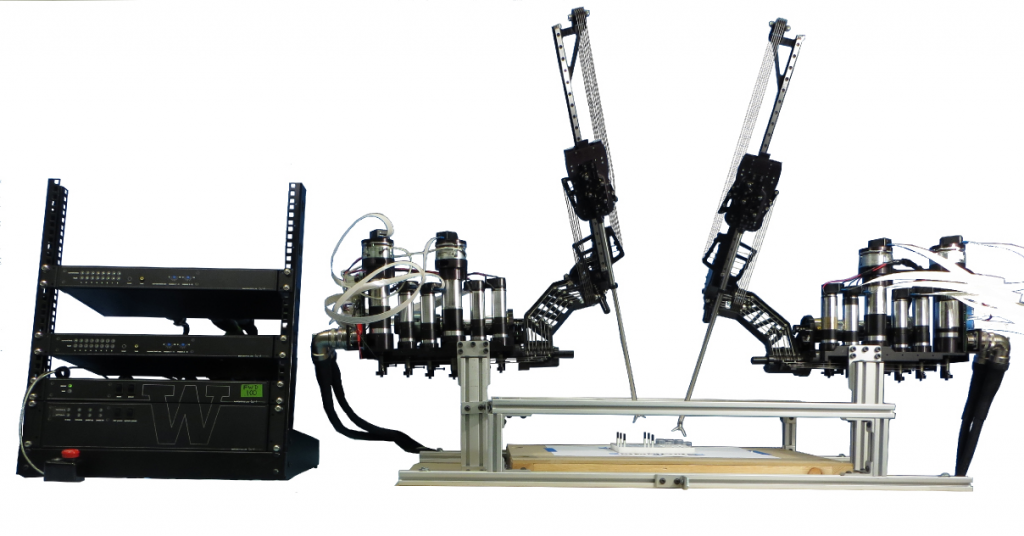
A cable-driven open research platform for surgical robotics and automation.
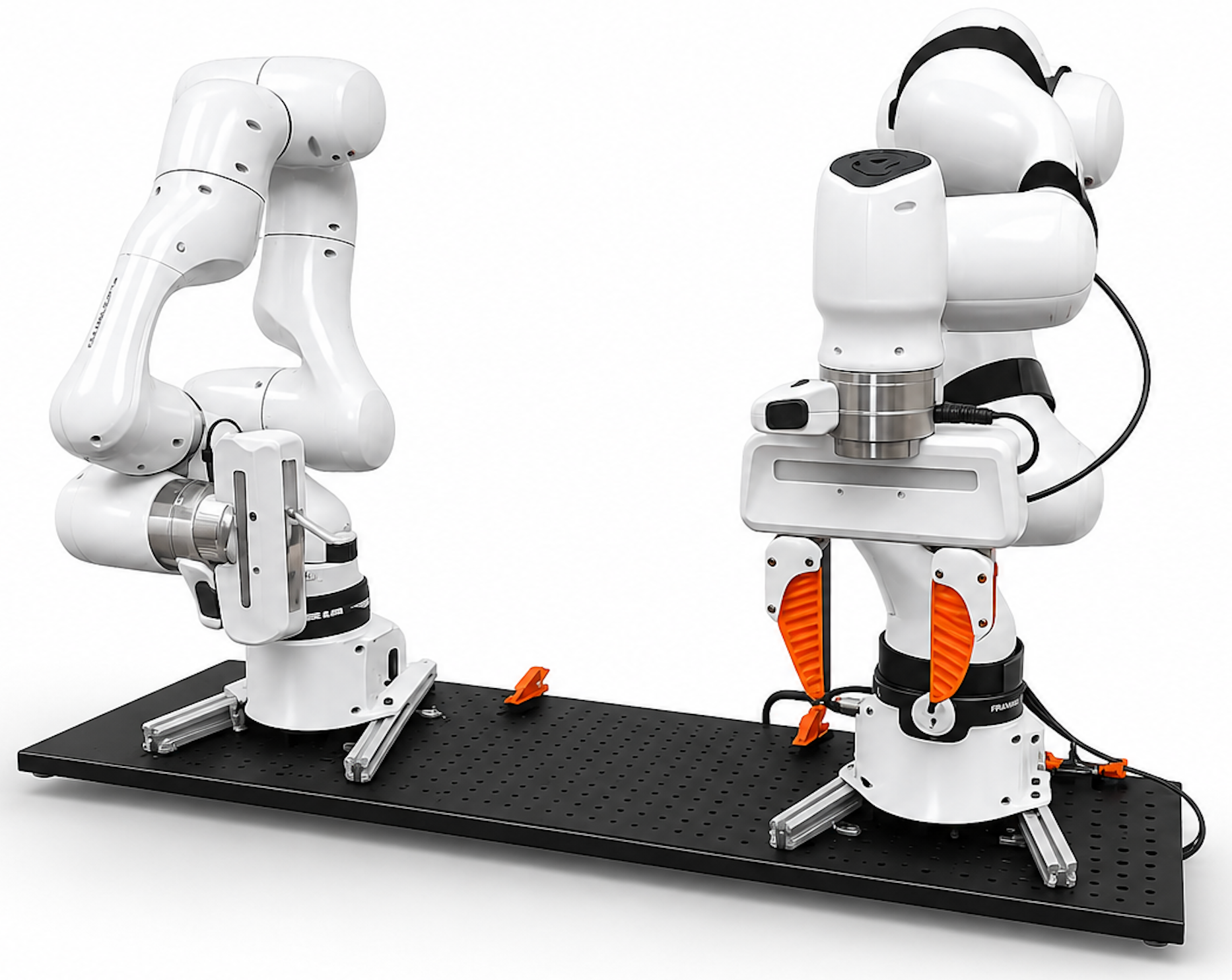
A dual-arm collaborative robotic platform with advanced force control for manipulation and robotics research.
A force-feedback device for teleoperation and haptic interaction research.