AI for Healthcare
We develop AI systems for healthcare applications, with a focus on intelligent perception, reasoning, and decision support for robotic surgery and clinical workflows. Our research aims to make medical AI more capable, reliable, and aligned with clinical practice.
Featured Publications
Jiajun Cheng, Xiaofan Yu, Subarna Tripathi, et al.
IROS 2026
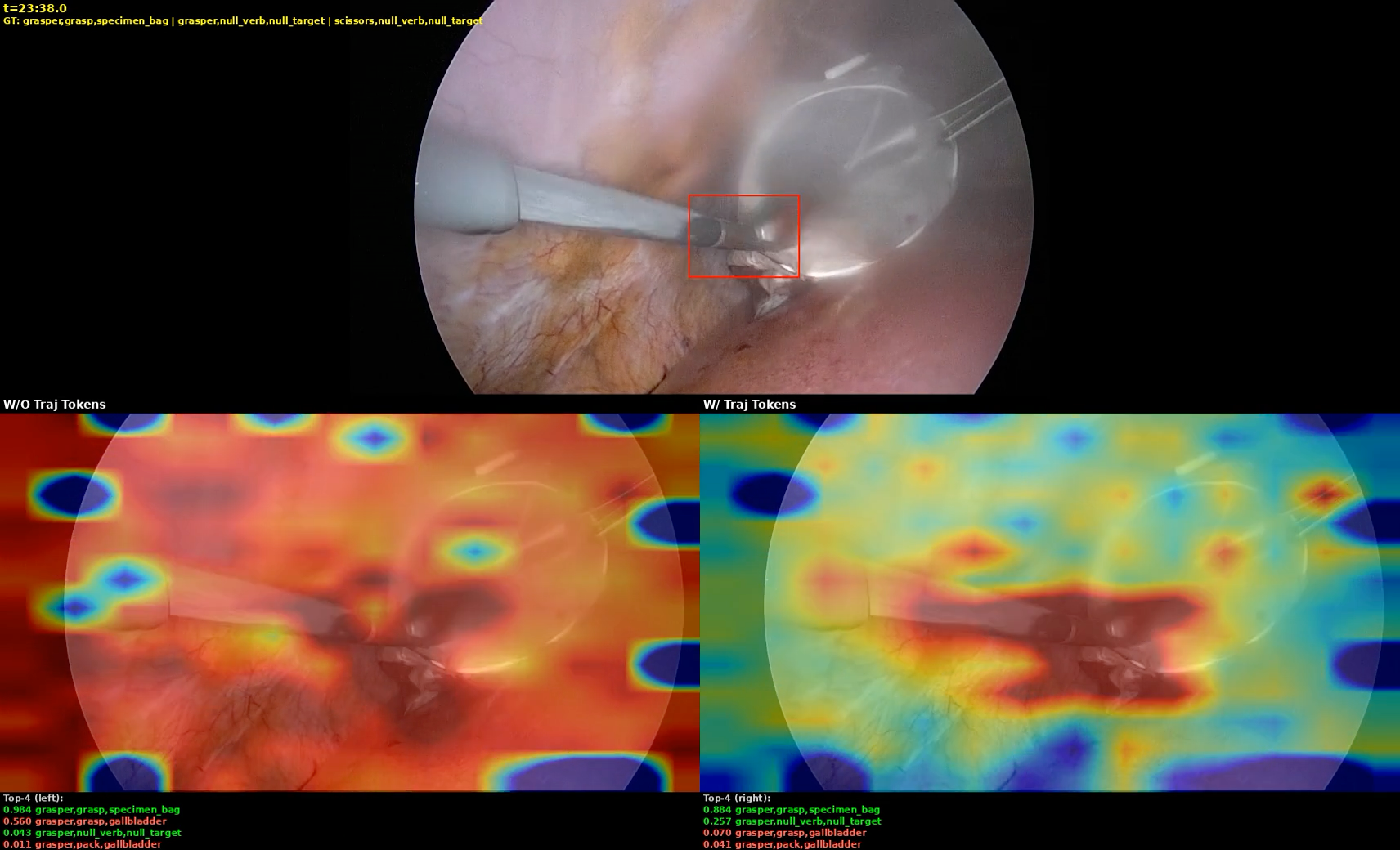
JEPA
Understand Dynamics
Jiajun Cheng, Xianwu Zhao, Sainan Liu, et al.
WACV 2026
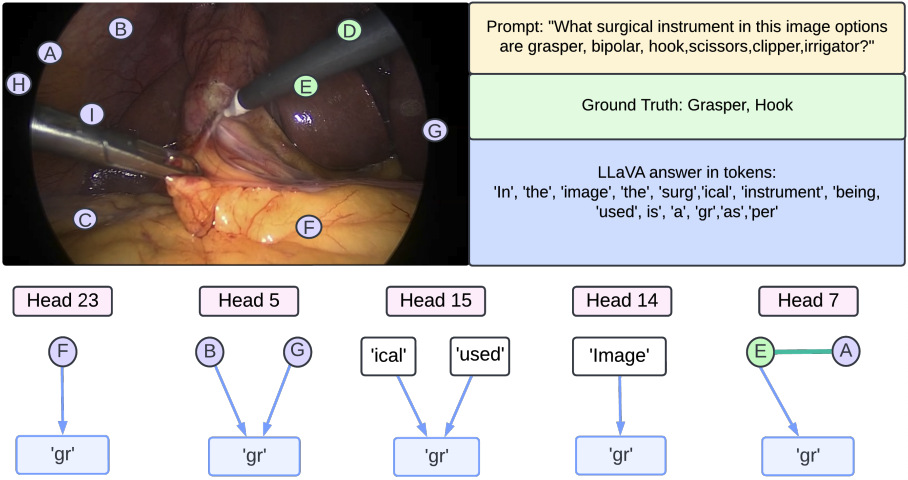
Surgical VLM Benchmark
Students
Collaborators
Intel

Intel
University of California, Merced
Duke University
Duke University

Jonathan Katz, M.D.
University of Miami
Publications
2026
Jiajun Cheng, Xiaofan Yu, Subarna Tripathi, Sainan Liu, Shan Lin
IROS 2026
2026
Jiajun Cheng, Xianwu Zhao, Sainan Liu, Xiaofan Yu, Ravi Prakash, Patrick Codd, Jonathan Katz, Shan Lin
WACV 2026