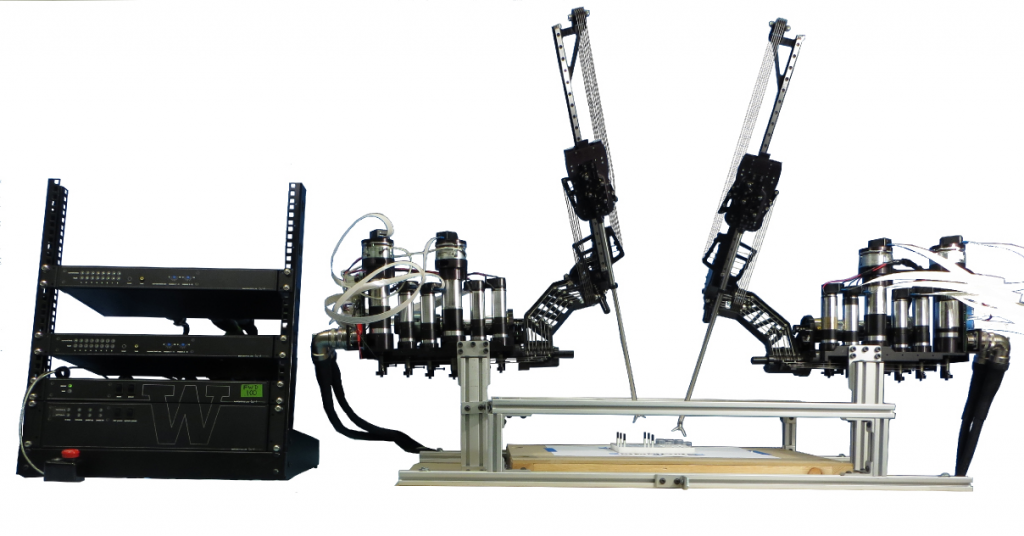
RAVEN II
Surgical Robot
RAVEN II is a cable-driven, open-source surgical robotic platform for research in telesurgery and autonomous surgical task execution.
Key Features
- Dual-arm surgical robotics platform
- Compatible with teleoperation systems
- Programmable for research
Projects
- Surgical task automation studies
- Robotic skill learning and teleoperation
- Human–robot interaction experiments